Recovering hidden Shape from Sound
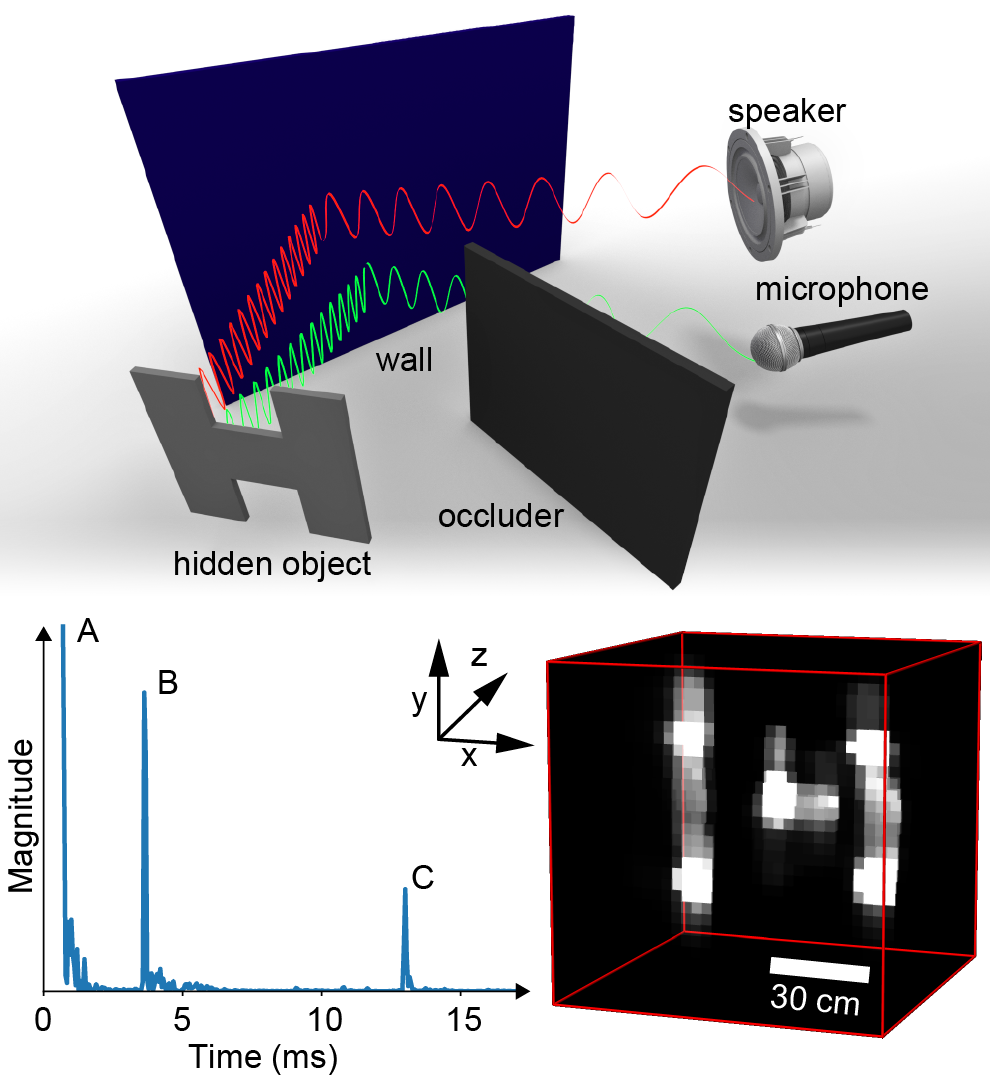 |
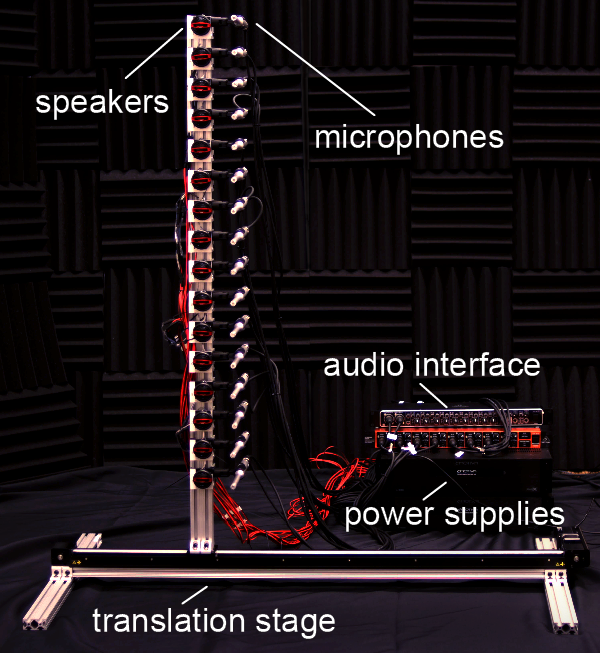
| Modulated sound waves are emitted from a speaker, travel around the corner to a hidden object, and are then recorded by a microphone as they reflect back. The processed measurements (bottom left) contain peaks indicating the path lengths of sound which travels directly from the speaker to the microphone (A, peak is clipped), to the wall and back (B), and also to the hidden object and back (C). Such measurements are captured for a range of speaker and microphone positions to reconstruct the 3D geometry of the hidden object (bottom right). |
Acoustic Transmit Signal
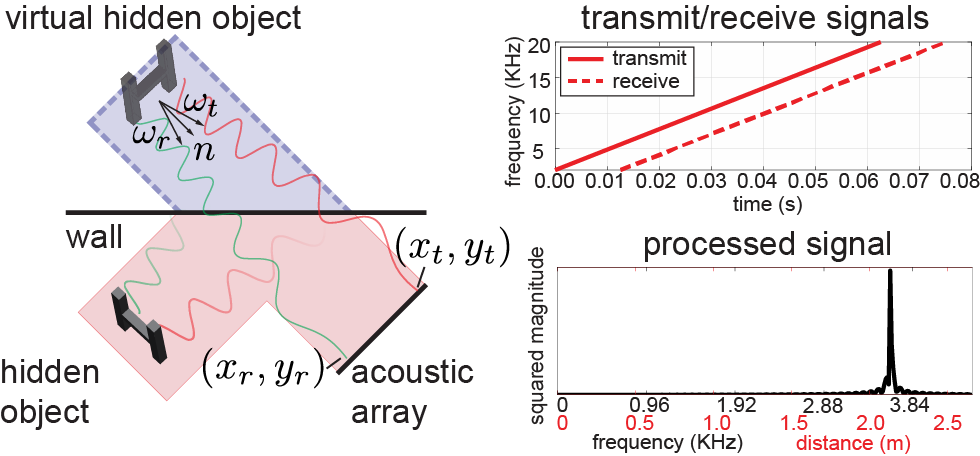 |
Due to the mirror-like scattering of the wall at acoustic wavelengths, the measurements appear to be captured from a mirrored volume located behind the wall, as if the wall were transparent. The transmit signal is a linear ramp in frequency over time. For a single reflector, the return signal is a delayed version of the transmit signal (top right). The receive and transmit signals are mixed together
and Fourier transformed, producing a sharp peak at a frequency proportional to the distance of the reflector (bottom right). |
FILES
- technical paper (link)
- technical paper supplement (link)
- code (link)
CITATION
David B. Lindell, Gordon Wetzstein, and Vladlen Koltun. 2019. Acoustic Non-Line-of-Sight Imaging. In Proc. CVPR.
BibTeX
@inproceedings{Lindell:2019:Acoustic,
author = {David B. Lindell and Gordon Wetzstein and Vladlen Koltun},
title = {{Acoustic non-line-of-sight imaging}},
journal = {Proc. CVPR},
year = {2019}
}
Related Projects
You may also be interested in related projects, where we have developed non-line-of-sight imaging systems:
- Metzler et al. 2021. Keyhole Imaging. IEEE Trans. Computational Imaging (link)
- Lindell et al. 2020. Confocal Diffuse Tomography. Nature Communications (link)
- Young et al. 2020. Non-line-of-sight Surface Reconstruction using the Directional Light-cone Transform. CVPR (link)
- Lindell et al. 2019. Wave-based Non-line-of-sight Imaging using Fast f-k Migration. ACM SIGGRAPH (link)
- Heide et al. 2019. Non-line-of-sight Imaging with Partial Occluders and Surface Normals. ACM Transactions on Graphics (presented at SIGGRAPH) (link)
- Lindell et al. 2019. Acoustic Non-line-of-sight Imaging. CVPR (link)
- O’Toole et al. 2018. Confocal Non-line-of-sight Imaging based on the Light-cone Transform. Nature (link)
and direct line-of-sight or transient imaging systems:
- Bergman et al. 2020. Deep Adaptive LiDAR: End-to-end Optimization of Sampling and Depth Completion at Low Sampling Rates. ICCP (link)
- Nishimura et al. 2020. 3D Imaging with an RGB camera and a single SPAD. ECCV (link)
- Heide et al. 2019. Sub-picosecond photon-efficient 3D imaging using single-photon sensors. Scientific Reports (link)
- Lindell et al. 2018. Single-Photon 3D Imaging with Deep Sensor Fusions. ACM SIGGRAPH (link)
- O’Toole et al. 2017. Reconstructing Transient Images from Single-Photon Sensors. CVPR (link)
Acknowledgements
This project was supported by a Stanford Graduate Fellowship, an NSF CAREER Award (IIS 1553333), a Terman Faculty Fellowship, a Sloan Fellowship, by the KAUST Office of Sponsored Research through the Visual Computing Center CCF grant, the Center for Automotive Research at Stanford (CARS), the DARPA REVEAL program, and a PECASE from the ARO.